
Publications
Full list available on Google Scholar.
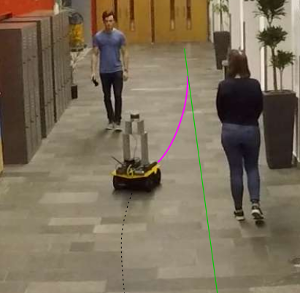
Where to Go Next: Learning a Subgoal Recommendation Policy for Navigation Among Pedestrians
Bruno Brito, Michael Everett, Jonathan P. How and Javier Alonso-Mora
IEEE Robotics and Automation Letters (RA-L) + ICRA 2021
Paper:  Video:
Video: ![]() Code:
Code: 
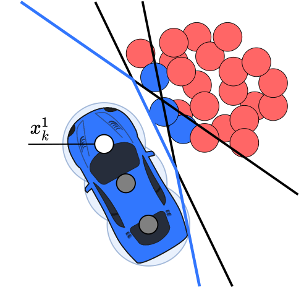
Learning Interaction-aware Guidance Policies for Motion Planning in Dense Traffic Scenarios
Bruno Brito, Achin Agarwal and Javier Alonso-Mora
IEEE Transactions on Intelligent Transportation Systems
Paper:
Scenario-Based Trajectory Optimization in Uncertain Dynamic Environments
Oscar de Groot, Bruno Brito, Laura Ferranti, Dariu Gavrila and Javier Alonso-Mora
IEEE Robotics and Automation Letters (RA-L) + ICRA 2021
Paper:
Video: ![]()
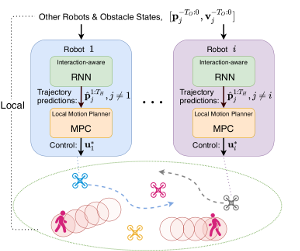
Learning Interaction-Aware Trajectory Predictions for Decentralized Multi-Robot Motion Planning in Dynamic Environments
Hai Zhu, Francisco Martinez Claramunt, Bruno Brito and Javier Alonso-Mora
IEEE Robotics and Automation Letters (RA-L) + ICRA 2021
Paper:
Video: ![]() Code:
Code:

Social-VRNN: One-Shot Multi-modal Trajectory Prediction for Interacting Pedestrians
Bruno Brito, Hai Zhu, Wei Pan and Javier Alonso-Mora
Conference on Robot Learning (CoRL) 2020
Paper:
Video: ![]() Code:
Code:
Model Predictive Contouring Control for Collision Avoidance in Unstructured Dynamic Environments
Bruno Brito, Boaz Floor, Laura Ferranti and Javier Alonso-Mora
IEEE Robotics and Automation Letters (RA-L) + IROS 2019
Paper:
Video: ![]() Code:
Code:

SafeVRU: A Research Platform for the Interaction of Self-Driving Vehicles with Vulnerable Road Users
Laura Ferranti, Bruno Brito, Dariu Gavrila and Javier Alonso-Mora
IEEE Intelligent Vehicles Symposium (IV) 2019
Paper:
Video: ![]()

Towards Automated Order Picking Robots for Warehouses and Retail
Richard Bormann, Bruno Brito, Jochen Lindermayr, Marco Omainska and Mayank Patel
International Conference on Computer Vision Systems 2019
Video: ![]()

Guided Stochastic Optimization for Motion Planning
Richard Bormann, Bruno Brito et al.
Frontiers in Robotics and AI
Video: ![]()